2020/4/14 改訂(久しぶりに見直すと、不適当な多くの記述に気が付き改訂。)
iOS 12.2 以降で閲覧してください。
それ以前の iOS バージョンでは正常に表示されない場合がありますので、pdf をご参照ください。
回転運動は、力学の中でも面白い分野だと思います。
しかし、質点の運動がニュートンの運動法則に従うことは比較的理解しやすいのですが、こと回転運動になると直感的な理解が必ずしも容易でありません。そのために、回転が伴う運動には「何故だろう?」と不思議な感覚を味合うことがあります。
その一つの例が、重力が働く中で回転をしている車輪の振舞いでしょう。玩具のコマと全く同じ振舞いをしているのですが、コマの運動は見慣れているためか、特に不思議に感じることなく「当然予想される振舞い」と感じるのでしょう。
ところが回転する大きな車輪の場合はどうでしょう。
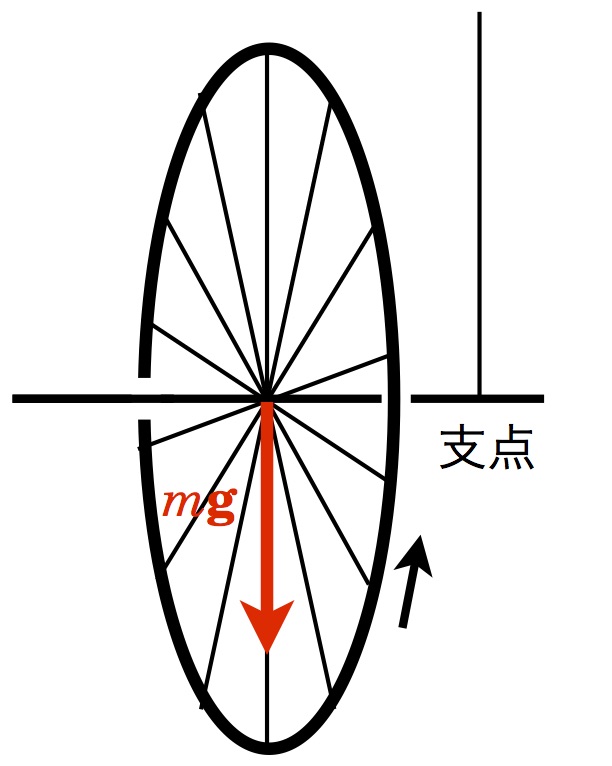 図1:片側を支えた回転する車輪
図1:片側を支えた回転する車輪
図1のように、回転運動をする自転車の車輪を水平に設置し、その軸の片側だけを支えると、支えている支点を中心にして車輪の重心が重力 $m\vec{g}$ に引かれて落下しそうですが、そうはなりません。「コマの首振り運動(歳差運動)」と全く同じように、支点を中心にして、車軸が水平面内を回転する歳差運動を始めます。
この振舞いは、確かにニュートンの運動方程式から予測される通りなのです。しかし、重力が車輪の重心に加わっているにもかかわらず、重力の方向に引かれて車軸が水平面から傾かないのは何故だろう?と感じるのは、地表で重力の影響を強く受けながら暮らす我々にとって自然なことです。
この疑問について考えてみましょう。次の2通りの考え方をしてみます。
- ニュートンの運動方程式
$$m\vec{a}=m\frac{d\vec{v}}{dt}=\frac{d\vec{P}}{dt}=\vec{F}$$
を変形して、回転運動の直感的な予測を可能にしてくれる「回転の運動方程式 $\large\frac{d\vec{L}}{dt}$ $=\vec{N}$」の予測を確認する
- 回転の運動方程式を用いずに、ニュートンの運動方程式から直接的に理解を試みる
ここで、$m$ (kg) は質量、$\vec{a}$ (m/s$^2$) は加速度、$\vec{v}$ (m/s) は速度、$\vec{P}=m\vec{v}$ (kg$\cdot$m/s) は運動量、$\vec{F}$ (N : Newton, kg$\cdot$m/s$^2$) は力を表します。また、$\vec{L}=\vec{r}\times\vec{P}$ (kg$\cdot$m$^2$/s) は角運動量($\vec{r}$ (m) は位置座標)、$\vec{N}=\vec{r}\times\vec{F}$ (N$\cdot$m) は力のモーメントです。
記号の頭に「→」が付いた量はベクトル(ここでは、$x,\,y,\,z$ の3つの方向の成分を持つ量)であることを意味します。
また「$\times$」記号は、ベクトル間の掛け算の一種の「外積」を表します。
外積の詳細な定義はともかく、ここで必要な事は、2つのベクトル $\vec{a}$ と $\vec{b}$ の外積は新たなベクトルとして定義される事です。そして、その大きさは、$ab \sin\theta$(2つのベクトル $\vec{a}$ と $\vec{b}$ で張る平行四辺形の面積に相当)で与えられ、そのベクトルの方向は、両ベクトルに垂直な方向に定義されます。右手系では図2のように定義され、左手系の場合の方向は「$-\hat{e}$」の方向に定義されます。
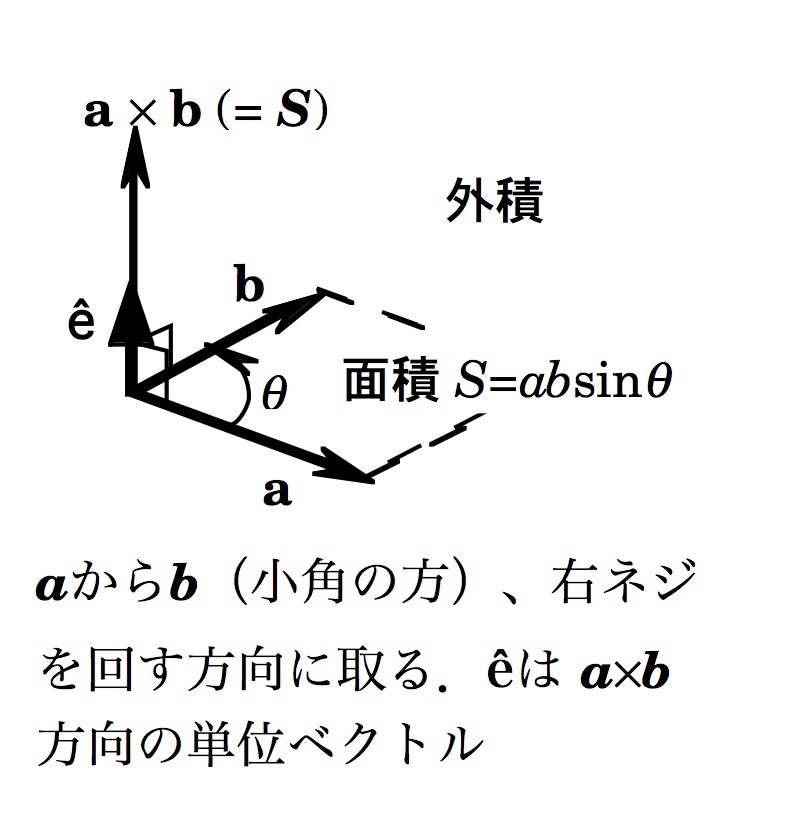
図2:2つのベクトル $\vec{a}$ と $\vec{b}$ の外積
回転の運動方程式による理解
さて、最初に 1. について考えましょう。
ニュートンの運動方程式
ニュートンの運動方程式は
$$\begin{equation}
m\vec{a}=m\frac{d\vec{v}}{dt}=\vec{F}
\label{Newton}
\end{equation}$$
で与えられます。外部から加えられた力、外力 $\vec{F}=\vec{F}_{ext}$ によって物体の速度が変化する事を示しています。
さて、物体が回転運動をしている時にはどんな外力が働いているのか考えてみましょう。
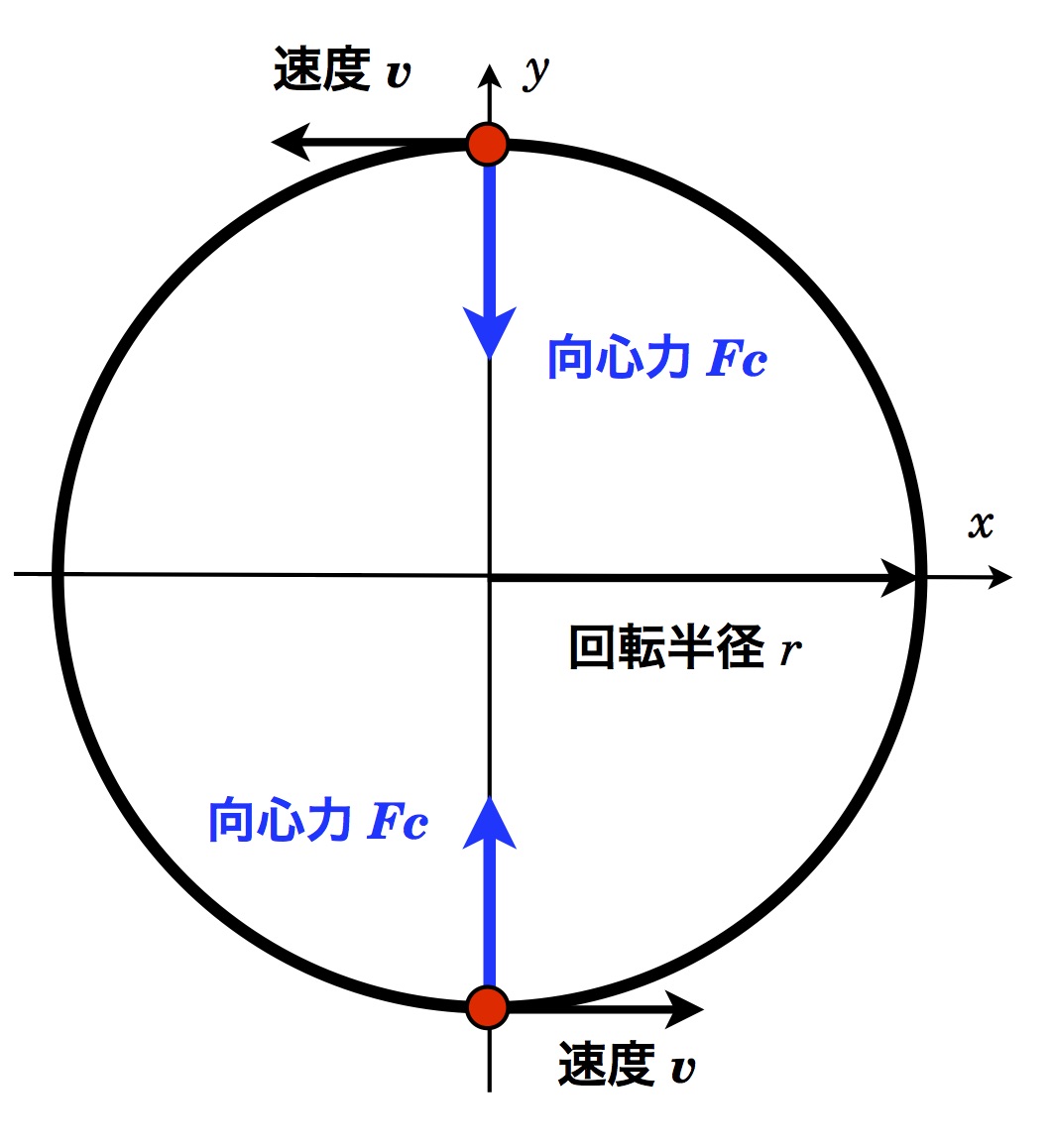
図3:2つの質点アレーの速度と働く向心力
図3に示す様に、同一の質量を持つ2つの質点を重さのない一様な棒で結び、棒に垂直で長さの中心を通る回転軸を持つ回転体を考えます(竹とんぼのイメージです)。
2つの質点が円周上を速度 $\vec{v}$ で回転するためには、棒が2つの質点に回転中心方向の力(向心力)を加え、質点の軌道を円周上に引戻す必要があります。
さもなくば、濡れた雨傘を回転した際に、雨傘の接線方向に水滴が飛んで行くように、速度 $v$ の質点はそのままの速度と方向に、重力の影響を除けば、式($\ref{Newton}$)が示す等速直線運動をするはずです。
図3に書かれた「向心力 $\vec{F_c}$」は、2つの質点を円軌道上まで引き寄せるのに要する力として見積る事ができます。
$$\begin{equation}
\vec{F}_c=-m\vec{r}\omega^2
\label{cForce}
\end{equation}$$
向心力 $\vec{F_c}$ は、原点から出て行く位置座標ベクトル $\vec{r}$ に負号の付く方向を向いていますので、原点(回転中心に取る事にします)に向かう力になります。
ここで、$\vec{\omega}$ (rad/s) は角速度ベクトルで、回転軸に並行で角速度の大きさを持ちます。速度 $\vec{v}$ とは $\vec{v}=\vec{\omega}\times\vec{r}$ の関係があります(外積の定義に注意して角速度ベクトルの方向を確認してください。この図では、$\vec{\omega}$ は画面に垂直で手前方向を向いています)。
回転中心を原点とする右手系の座標系 $O$-$xyz$ を用いると、一つの質点の位置座標の時間変化は $x-$軸からの回転角度 $\theta=\omega t$ (rad) を用いて、
$$\begin{equation}
\vec{r}(t)=(x(t), y(t))=(r\cos(\omega t),\,r\sin(\omega t))=r(\cos(\omega t),\,\sin(\omega t))
\label{position}
\end{equation}$$
と表されます。位置座標を時間で微分すると、位置の時間変化率である速度 $\vec{v}=\large\frac{d\vec{r}}{dt}$ が得られ、もう一回時間で微分すると速度の変化率の加速度 $\vec{a}=\large\frac{d\vec{v}}{dt}=\frac{d^2\vec{r}}{dt^2}$ が得られます。回転中心に向かう向心加速度 $\vec{a}_c=\large\frac{d^2\vec{r}}{dt^2}$ は
$$\begin{equation}
\vec{a}_c(t)=-\omega^2(x(t), y(t))=-\vec{r}(t)\omega^2
\end{equation}$$
と得られ、その加速度を生む向心力は式 ($\ref{Newton}$) から式 ($\ref{cForce}$) で与えられる事が確認できます。
回転運動時に質点に働く向心力($\ref{cForce}$)をニュートンの運動方程式($\ref{Newton}$)に代入すれば、回転運動する系に向心力 $\vec{F_c}$ 以外の外力 $\vec{F}_{ext}$ を加えた場合の振舞いを表す事ができます。
$$\begin{equation}
m\frac{d\vec{v}}{dt}=\vec{F}_{ext}+\vec{F}_c
\label{rotationbyNewton}
\end{equation}$$
この運動方程式を直交座標系に於ける向心力を具体的に表現し、$x,\,y$ 成分で表記しましょう。
$$\begin{equation}
m\frac{dv_x}{dt}=mg_{x}-mr\omega^2\cos(\omega t) \\
m\frac{dv_y}{dt}=mg_{y}-mr\omega^2\sin(\omega t)
\label{rotationbyNewton2}
\end{equation}$$
ここで最も単純な例は、外力が働かない場合($\vec{F}_{ext}=m\vec{g}=0$)の等速円運動で、$mr\omega^2$ は時間に依存しない定数になりますので、容易に積分できて、元の式($\ref{position}$)が得られます。
しかし、知りたいのは重力が働いている場合の回転する車輪の振舞いです。
この場合は、車輪の運動は $x,\,y$ 面内に限定されません。図1において、回転していない車輪の様に重力の方向に落下する場合でも、また、支点を中心に車軸が回転運動(歳差運動)する、回転する車輪の場合でも、2つの質点の位置座標は $x,\,y$ に加えて $z$ 軸成分を持ちます。
この場合には図4の様に、時間によらずに、常に同じ方向を向いている重力 $\vec{F}_{ext}=m\vec{g}$ の方向を座標の基準に取る方が良いかもしれません。
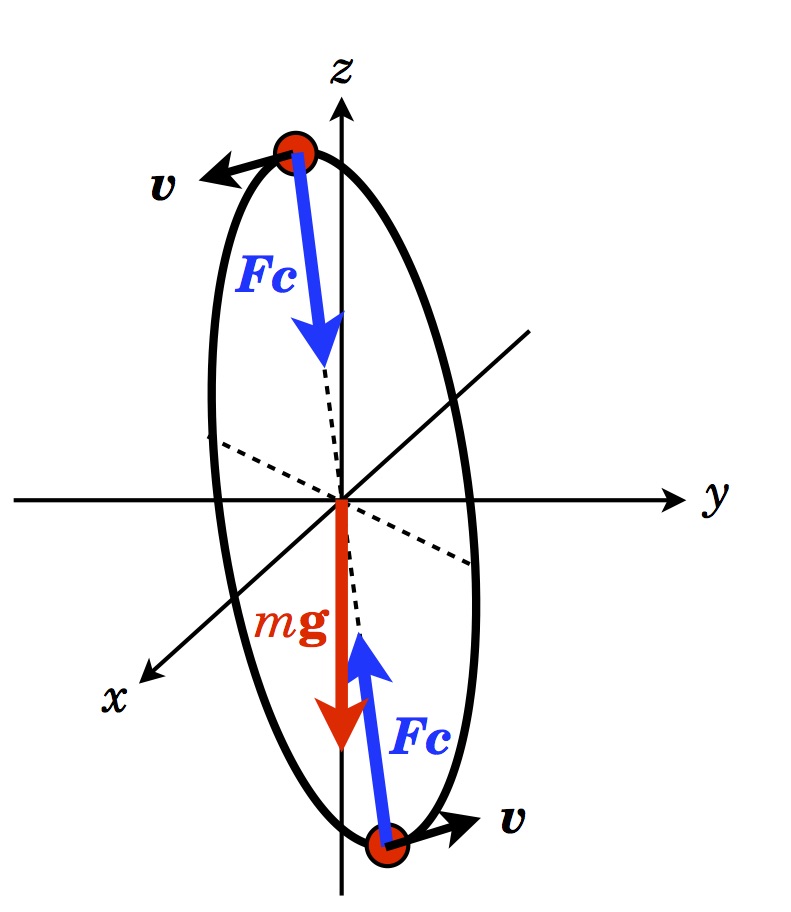
図4:重力の方向を $z-$軸に取った座標
その際に、回転する車輪の振舞いを調べる上で最も大きな問題は、向心力 $\vec{F_c}$ の取扱いにあります。
支点に対して車軸が何らかの運動を始めると、重力が無い場合の式($\ref{rotationbyNewton2}$)では単純な円運動だったのが、3次元的に複雑な運動を始めます。しかも、その振舞いは、実に厄介なことに、運動方程式を解かないと知ることが出来ないことです。数式を微積分を用いて解析的に解く上で、致命的な事です。
回転の運動方程式
この問題を解決するための、非常に有用な方法があります。それは、ベクトルの外積を利用する方法です。
ベクトルの外積を利用する
ベクトルの外積は、単に数学的に定義された「ベクトル間の積」に過ぎませんが、重力が働く下で回転する車輪がどの様に振舞うか?を知る上で非常に有用な手段を提供してくれます。
その理由は、2つのベクトル $\vec{a},\,\vec{b}$ の外積の大きさが $ab\sin\theta$ で定義されることです。ここで $\theta\, (\le \pi)$ は2つのベクトルが成す角度ですので、$\theta=0,\,\pi$ にすれば
$$\vec{a}\times\vec{b}=0$$
とすることが出来るのです。
$\vec{b}=\vec{F}_c$ とすると、それに平行、或いは反平行なベクトルを $\vec{a}$ として選んであげれば、見掛け上、運動方程式から向心力を消去することができるのです!!素晴らしいですね。
さて、どんなベクトルを $\vec{a}$ として選ぶことが出来るでしょうか?時間が経過しても、常に向心力と平行か反平行状態を保たねば目的を達成できません。
そうです、原点から各質点に引かれた位置ベクトル $\vec{r}$ がこの条件を常に満たしています。
回転の運動方程式の導出
重力と向心力を顕に含むニュートンの運動方程式($\ref{rotationbyNewton}$)に、位置ベクトル $\vec{r}$ の外積を、左側から掛けてみましょう(外積の定義の図2から、$\vec{a}\times\vec{b}=-\vec{b}\times\vec{a}$ となることに注意してください)。2つの反平行なベクトルの外積なので、$\vec{r}\times\vec{F}_c=0$ となり、
$$\begin{equation}
m\vec{r}\times\frac{d\vec{v}}{dt}=\vec{r}\times\vec{F}_{ext}+\vec{r}\times\vec{F}_c=\vec{r}\times\vec{F}_{ext}
\label{rotationbyNewton3}
\end{equation}$$
と変形でき、見事に向心力が消えています。
ここで、左辺が $\large\frac{d(m\vec{r}\times\vec{v})}{dt}$ に等しいことを確認してみましょう。なお、質量 $m$ は古典力学の範囲では時間には依存しないとして時間微分記号の中に入れることができます。積の微分を実行して確認できます。
$$\begin{equation}
\frac{d(m\vec{r}\times\vec{v})}{dt}=m\frac{d\vec{r}}{dt}\times\vec{v}+m\vec{r}\times\frac{d\vec{v}}{dt}=m\vec{v}\times\vec{v}+m\vec{r}\times\frac{d\vec{v}}{dt}=m\vec{r}\times\frac{d\vec{v}}{dt}
\label{identity}
\end{equation}$$
ここで、互いに平行なベクトル同士の外積はゼロになります。この関係を式($\ref{rotationbyNewton3}$)に代入して次のように整理できます。
$$\begin{equation}
\frac{d(m\vec{r}\times\vec{v})}{dt}=\vec{r}\times\vec{F}_{ext}
\label{eqofrotation}
\end{equation}$$
これは回転の運動方程式と呼ばれ、質点に常に向心力が働いている回転運動を理解する強力な助っ人になります。大まかな振舞いであれば、式を積分して解かなくても予想できます。
通常は、新たに定義される物理量、角運動量 $\vec{L}$ と 力のモーメント $\vec{N}$ を用いて
$$\begin{equation}
\frac{d\vec{L}}{dt}=\vec{N}
\label{Newtonforrotation}
\end{equation}$$
と、簡素な形で表現されます。働く力のモーメントが無ければ、$\large\frac{d\vec{L}}{dt}$ $=\vec{N}=0$ より、その時に持っている角運動量 $\vec{L}$ が保存される(時間が経過しても変化しない)ことを表しています。
質点の運動の場合に、外力 $\vec{F}$ が働かなければ、質点がその時に持つ運動量 $\vec{P}$ が保たれる事に対応した、回転運動の特徴をよく捉えた表現です。
角運動量 $\vec{L}$ と力のモーメント $\vec{N}$
角運動量ベクトル $\vec{L}$ と力のモーメント $\vec{N}$ の定義は以下の通りです。
$$\begin{equation}
\vec{L}=m\vec{r}\times\vec{v}=\vec{r}\times\vec{P}=mr^2\vec{\omega}
\label{definition1}
\end{equation}$$
$$\begin{equation}
\vec{N}=\vec{r}\times\vec{F}_{ext}
\label{definition2}
\end{equation}$$
ここで、以前にも用いた速度の表現 $\vec{v}=\vec{\omega}\times\vec{r}$ と $\vec{r}\times(\vec{\omega}\times\vec{r})=r^2\vec{\omega}$ を使いました。($\vec{\omega}\perp\vec{r},\,\vec{\omega}\times\vec{r}$ から $\vec{r}\times(\vec{\omega}\times\vec{r})\propto\vec{\omega}$ が、更に、$\vec{r}\perp\vec{\omega}\times\vec{r}$ も組合せるとベクトルの外積の定義より確認できます)
質点の運動の激しさを反映する量は、運動量 $\vec{P}=m\vec{v}$ でした。速度 $\vec{v}$ が大きいほど、慣性質量 $m$ が大きいほど、その運動を止める際の、運動の激しさを反映する衝撃は大きくなります。
角運動量 $\vec{L}$ は回転運動の激しさを反映する量になります。回転運動の激しさは、回転速度に比例する角速度 $\vec{\omega}$ で表現されます。
一方、角速度 $\vec{\omega}$ の変化の仕方は、同じ力のモーメント $\vec{N}$ を加えても、回転体の半径 $r$ に強く依存します。回転の運動方程式($\ref{Newtonforrotation}$)を角速度 $\vec{\omega}$ で表して見ましょう。
$$\begin{equation}
mr^2\frac{d\vec{\omega}}{dt}=\vec{N} \\
\frac{d\vec{\omega}}{dt}=\frac{\vec{N}}{mr^2}=\frac{\vec{N}}{I}
\label{Newtonforrotation2}
\end{equation}$$
ここで、$I=mr^2$ は、慣性モーメントと呼ばれます。慣性モーメント $I$ が大きくなると、同じ力のモーメント $\vec{N}$ で得られる角速度の変化率が反比例($\propto\frac{\vec{N}}{I}$)して小さくなり、$I=mr^2$ が「回転のし難さ」を表現している事がわかります。
同じ角速度まで回転させる場合、回転半径 $r$ の回転体に対し、回転半径が2倍の $2r$ の回転体では質点の速度が2倍になる必要があります。
そこで、半径が $r$ と $2r$ の回転体に、同じ大きさの力のモーメント $N$($=rF=2r(F/2)$)を加えてみましょう。同一の大きさの $N$ ということは、半径が $r$ の場合に質点に働く力 $F$ に対して、半径 $2r$ ではその半分の $F/2$ しか加わっていません。その結果、半径 $r$ で速度が $v$ に加速された時、半径 $2r$ では半分の力で $v/2$ までしか加速されません。
これは、半径 $r$ の場合に得られた角速度の 4 分の1($=(\frac{r^2}{(2r)^2}$))です。これが回転のし難さ $I$ が $r^2$ に比例する理由です。
図4のように2質点からなる回転体を考えると、回転体全体の慣性モーメントは $I=2mr^2$ となります。一般的な形の回転体については、質点の集まりと考えて計算する事ができます。
一方、力のモーメント $\vec{N}=\vec{r}\times\vec{F}$ はトルク(単位は N$\cdot$m)とも呼ばれ、その大きさ $rF\sin\theta$ は回転を起こす能力の大きさを、その方向は生じさせる角運動量の方向を表します。ここで、角 $\theta$ は、$\vec{r}$ と $\vec{F}$ の成す角度です。
回転運動を起こす際には、可能な限り、回転軸からの距離 $l$ を大きくして外力 $\vec{F}$ を加えた方が、大きな回転能力を与える力のモーメント $\vec{L}=\vec{r}\times\vec{F}$ を発生できます。至近な例としては、ネジを回転するドライバーの持ち手が太いほど、固く締まったネジを回転できる事が挙げられます。
テコの原理
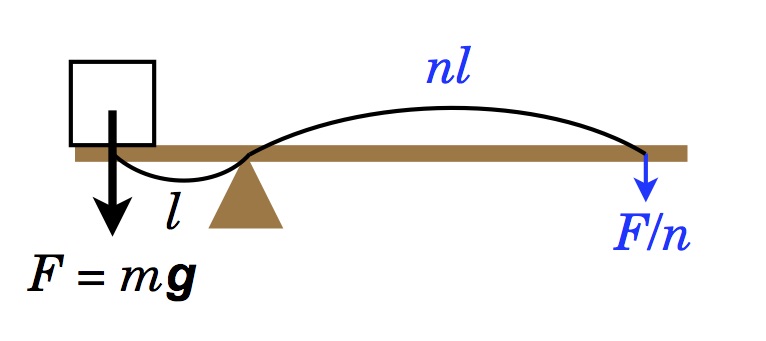
図5:テコの原理
これは「テコの原理」の元になる関係式でもあります(図5)。
テコをバランスさせるという事は、角運動量をゼロ($\vec{L}=0$)に保つ($\large\frac{d\vec{L}}{dt}$ $=0,$ $\,\therefore\,\vec{N}=0$)事に対応します。
テコに加える力を支点から遠くに離す($-n\vec{l},\,n\gt 1$)ほど、小さな力 $\vec{F}/n$ で、負荷の大きな力が作る $\vec{N}=\vec{l}\times\vec{F}$ と同じ大きさ、反対向きの力のモーメント $-n\vec{l}\times\vec{F}/n=-\vec{l}\times\vec{F}=-\vec{N}$ を生み出せます。
さて、テコを使うと、小さな力で重いものを動かす事ができます。何が起こっているのか考えてみましょう。
「力 $\vec{F}$ を加えながら距離 $\vec{s}$ 移動する」事を「仕事」をすると表現します。その累積量を仕事量 $W=\vec{F}\cdot\vec{s}$ と定義します。
これは、もう一つのベクトルの積として定義される「内積」です。
ベクトル間の積ですが、外積と違って、内積を取ると、ベクトルではなく数値(スカラー量)になります。ベクトル同士が成す角度を $\alpha$ とすると、$\vec{a}\cdot\vec{b}=ab\cos\alpha$ と定義されます。$\cos\alpha$ に比例しますので、2つのベクトルが平行か反平行の場合に、その大きさは最大になります。
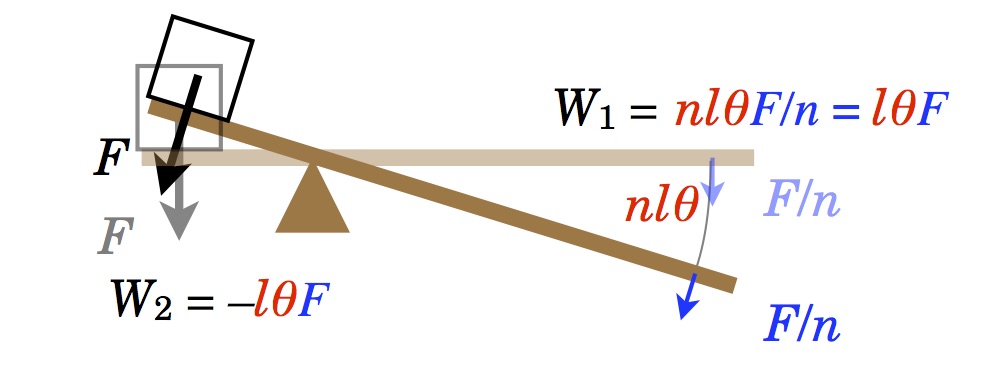
図6:テコのする仕事
便宜上、図6の様に、テコに加えた力 $\vec{F}/n$、及び負荷がテコに加える力 $\vec{F}$ は、テコが僅かに回転する間は、常にテコに垂直に力が加わっていると仮定しましょう。
ゆっくりと、僅かな角度づつ変化をさせながら、角度 $\theta$ だけ回転した状況を考えます。この間に、加えた力が成した仕事量は、僅かな距離 $d\vec{s}$ の動きを足し合わるために、距離 $nl\theta$ にわたって積分をして求めます。なお、その間中、力 $\vec{F}$ と微小距離 $\vec{ds}$ が常に互いに平行($\alpha=0$)であれば、$\vec{F}\cdot\vec{ds}=Fds$ となります。
$$\begin{equation}
W_{F/n}=\int_0^{nl\theta}\vec{F}/n\cdot d\vec{s}=(F/n)\int_0^{nl\theta}ds=(F/n)nl\theta=Fl\theta
\end{equation}$$
$$\begin{equation}
W_{負荷}=\int_0^{l\theta}\vec{F}\cdot d\vec{s}=-F\int_0^{l\theta}ds=-Fl\theta
\end{equation}$$
負荷の場合は、力の方向と動く方向は反平行なので、仕事量は負になります。これは、その分だけ負荷が仕事をされた事に相当します。
一般的に、力のモーメント $N$ を加えて角度が $\theta$ (rad) 回転すると、その間の仕事量は、$W=N\theta$ (N$\cdot$m) になります(rad は無次元量です)。
テコでは、小さな力で大きな仕事をするために、沢山の距離動かしています。これは、滑車を使う効果と同じです。滑車を沢山使って、天井から負荷を支える紐の本数を増やし、その本数分だけ小さな力で負荷を釣り上げる事ができます。しかし、負荷が動く距離に紐の本数分を掛けただけ、紐を沢山引かなければいけません。
回転する車輪の振舞
それでは、得られた回転の運動方程式を用いて、回転する車輪の振舞いを解析してみましょう。
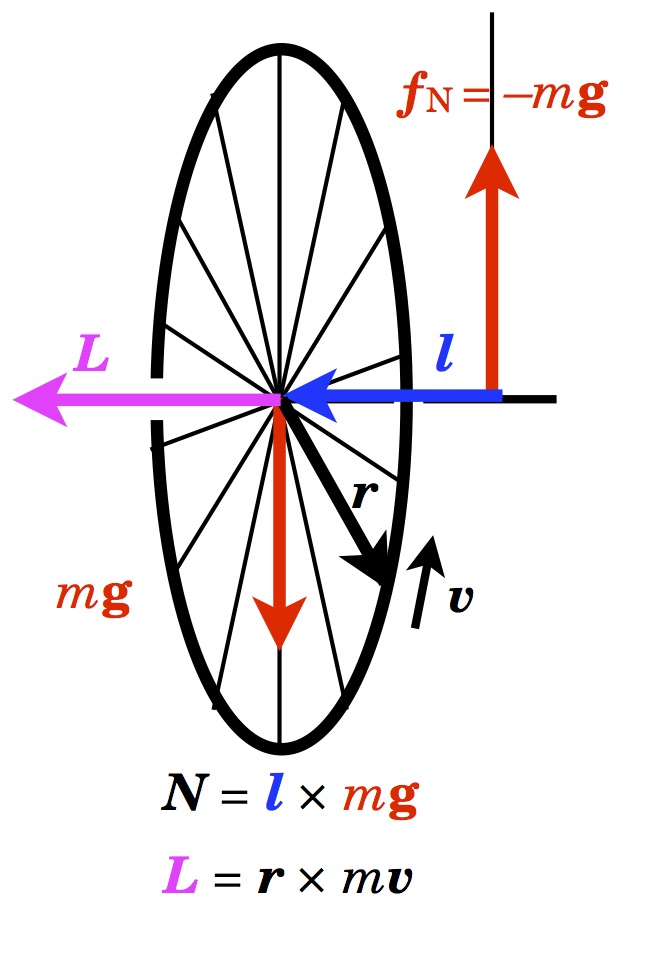 図7:回転の運動方程式による回転する車輪の振舞
図7:回転の運動方程式による回転する車輪の振舞
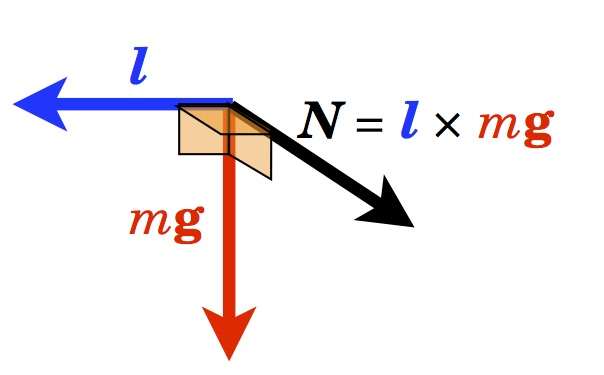 図7b:重力が生み出す力のモーメントの方向
図7b:重力が生み出す力のモーメントの方向
図7の様に、速度 $v$ で回転する車輪の重心に重力 $m\vec{g}$ が加わっています。水平に設置された車軸上で、重心から距離 $l$ の点を支点とすると、支点には重力に大きさが等しく反対向きの抗力 $f_N$ が働き、重力と釣り合います。
しかし、重力が働く点は、支点から $l$ だけ離れているために、力のモーメント $\vec{N}=\vec{l}\times m\vec{g}$ の効果を考慮する必要があります。
回転する車輪の角運動量 $\vec{L}$ は、図7に示すように車軸と平行です。一方、力のモーメントは、$\vec{N}=\vec{l}\times m\vec{g}$ なので、図7b に示すように、角運動量に垂直で、手前方向を向いています。
回転の運動方程式($\ref{Newtonforrotation}$)の両辺に微小時間 $dt$ を掛けると、微小時間 $dt$ の間にどれだけ角運動量が微小変化($d\vec{L}$)するかを知る事ができます。
$$\begin{equation}
d\vec{L}=\vec{N}dt
\label{difference}
\end{equation}$$
角運動量の変化量 $d\vec{L}$ は、経過時間 $dt$、及び、生じている力のモーメント $\vec{N}$ に比例します。
力のモーメントが発生後 $dt$ だけ経過すると、車輪の角運動量 $\vec{L}(dt)$ は、車輪の回転が持つ角運動量 $\vec{L}(t=0)$ と変化量 $d\vec{L}$ のベクトル和
$$\begin{equation}
\vec{L}(dt)=\vec{L}(0)+\vec{N}dt
\label{angularmomentum}
\end{equation}$$
に変化します。
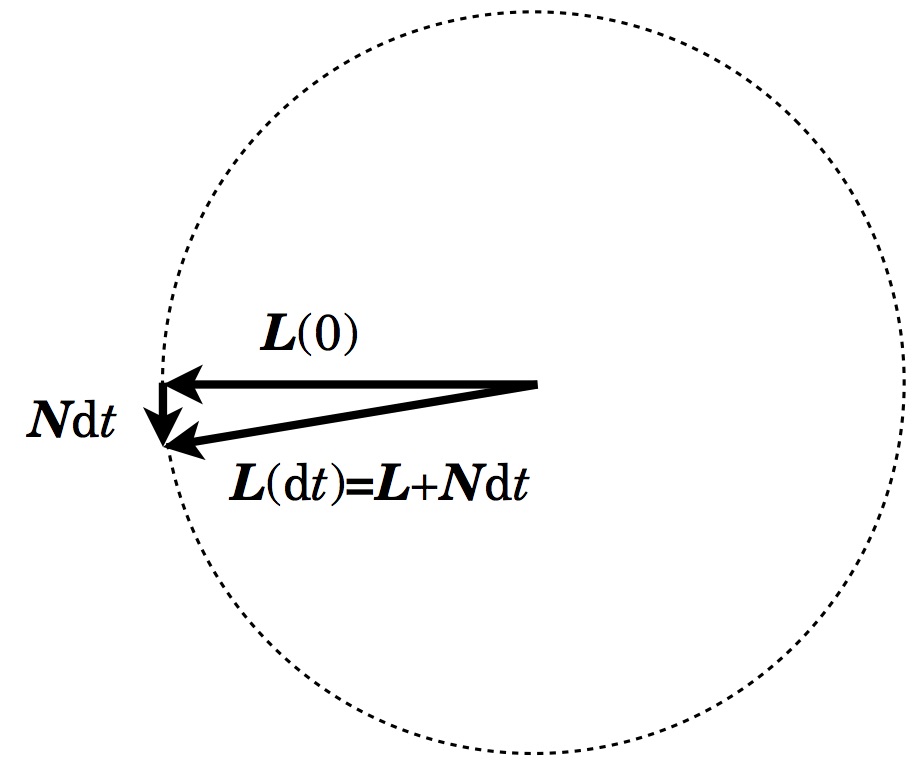
図8:回転する車輪の角運動量の変化
この変化をベクトル図で表現すると、図8に示すように、回転する車輪の角運動量ベクトル $\vec{L}$ が力のモーメント $\vec{N}$ の方向に $\vec{N}dt$ だけ回転することを表しています。この回転後の瞬間においても、図7b に示す、力のモーメントと角運動量の関係は変わりません。やはり、$\vec{N}(dt)$ は $\vec{L}(dt)$ と直交していますので、角運動量ベクトルは支点を中心に首振り運動を続けます。これを歳差運動と呼びます。
これは、実際に回転する車輪の振舞に一致します。
歳差運動における車輪の重心の円周速度の大きさ $v_{pr}$ は車輪の回転軸が水平で $N\ll L$ の場合、
$$\begin{equation}
v_{pr}=\frac{Ndt}{Ldt}•l=\frac{|\vec{l}\times 2m\vec{g}|}{|\vec{a}\times 2m\vec{v}|}•l=\frac{gl^2/a}{v}=\frac{g}{\omega}\left(\frac{l}{a}\right)^2
\label{precessionvel}
\end{equation}$$
と得られます。ここで、$\omega$ は質点の角速度を表します。
ニュートンの運動方程式による理解
さて、次に 2. について考えましょう。
ニュートンの運動方程式
時間とともに複雑に変化するため、取り扱いが困難な向心力をニュートンの運動方程式から消去した回転の運動方程式は、回転運動をする車輪等の振舞いの直感的な理解、解析を可能にしてくれました。
例えば、回転する車輪の車軸の片側だけを支えると、車輪の重心に働く重力の生み出す力のモーメントによって、歳差運動をする事が確認できました。
実際に、回転する車輪は回転の運動方程式から予測できる歳差運動をします。
しかし、車軸の片側だけしか支えていないのに車輪が重力の方向にどんどん傾いて行かない事実には、違和感を感じても不自然ではありません。投げ上げたボールは、重力に引かれて、やがて地表に落下します。
車輪がそのような振舞いをしないで歳差運動をする理由を、質点の運動を説明するニュートンの運動方程式($\ref{Newton}$)を使って理解を試みましょう。
回転する車輪の運動
それでは、2つの質点系からなる回転体を例にして、各質点に働く力と、その力から予測できる運動を考えてみましょう。
考えるべき運動方程式($\ref{rotationbyNewton}$)は、時間変化を露わに表記して
$$\begin{equation}
m\frac{d\vec{v}(t)}{dt}=\vec{F}_{ext}+\vec{F}_c(t)
\label{Newton2}
\end{equation}$$
になります。ここで、$\vec{F}_c(t)$ は質点に働く回転による向心力、外力 $\vec{F}_{ext}$ として重力 $m\vec{g}$ と支点に働く抗力 $\vec{T}$ を考えます。
車輪に働く力
最初は、車軸を重心の両側の2カ所で支えましょう。
重力は、2つの支点に働く抗力の合計 $T$ と吊り合い、打ち消されます。これは、式($\ref{Newton2}$)の右辺の外力が単純に時間によらず $\vec{F}_{ext}=m\vec{g}+\vec{T}=0$ であることを表します。更に、2つの支点の周りの重力による2つの力のモーメントも、互いに打ち消し合いますので、力のモーメントによる車輪の運動への影響はありません。
その結果、容易に式($\ref{Newton2}$)を積分して解が得られます。図3のように、2つの質点の速度と回転中心に向かう向心力の大きさは互いに等しく、車輪の重心位置は静止したまま、2つの質点は、半径 $r$ の円周上を繰り返し廻ります。
次に、片方の支えを外しましょう。
変化する点は、外力としては、重力と吊り合う抗力が1つの支点に集まること。両者の大きさと方向が吊り合うことはこの場合も変わらずに成り立ちます。
一方、変化するのは、単一の支点の周りの重力によるゼロでない力のモーメントが発生することです。
この力のモーメントの影響として、$\vec{F}_c(t)$ の時間依存性が変わってくるはずです。
支点が1つであるため、重力による力のモーメントが支点の回りの車軸の回転を与えるはずです。その回転軸の変化に応じて、車輪の回転による向心力の大きさと方向が僅かですが変化を受けます。その変化は、式($\ref{Newtonforrotation}$)の助けを得ずには、この運動方程式($\ref{Newton2}$)を解かない限り決定できません。しかし、$\vec{F}_c(t)$ の時間依存性は(式($\ref{Newtonforrotation}$)の助けを得ない限り)未知関数なので、このまま解析的に積分することはできません。
ここで式($\ref{Newton2}$)のみを用いて考えを進めてみましょう。
考察を試みるのは、2つの支点を1つに減らした直後です。
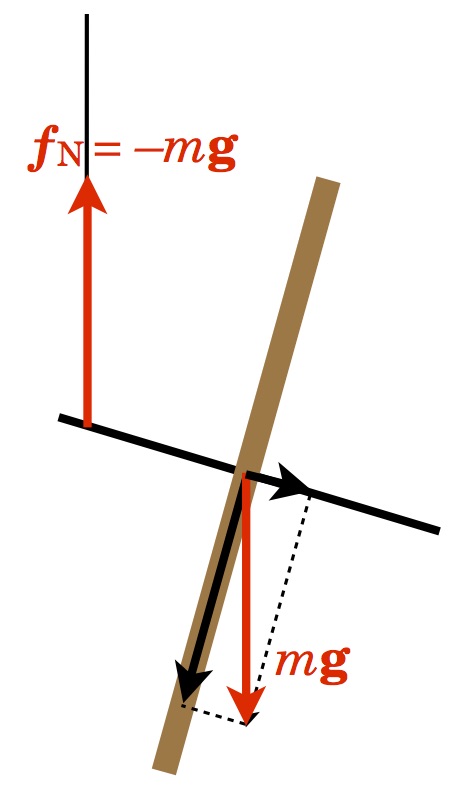
図9:回転する車輪に働く力
支点数を一つに減らした後、時間が経過すると重力の影響により僅かながら車輪の重心位置が下がって来ると予想されます。$\vec{l}$ と $m\vec{g}$ の成す角 $\theta$ が $\theta\gt \pi/2$ となるため、車輪の回転面内成分の重力の大きさは僅かに減少しますが、直後ではほぼ $m\vec{g}$ を保っているとして考察します。
さて、式(\ref{Newton2})のみで考える場合に、力のモーメント $\vec{N}$ の効果はどのように考慮したらよいでしょうか。
ここで、一つの極端な条件を考えてみましょう。支点と車輪の重心を結ぶ「腕の長さ」が無限に長い場合です。
この場合は、有限の距離を落下しても、腕の長さが無限に長いので、腕は水平からほとんど変化しません。結果として、2つの質点には単純に、それぞれに重力 $m\vec{g}$ が働くと近似できます。
そこで、腕の長さが有限の場合でも特定の条件下では、それぞれの質点に重力が働いていると考える事が出来そうです。その条件は、車輪の落下距離が非常に小さく「腕が水平から大きくずれていない」場合です。この範囲であれば、「支点で車軸が拘束されている」影響が無視できます。
この条件下で更に考察を進めましょう。
支点を1つに減らした直後に、2つの質点が最上端と最下端に位置する瞬間に働く力を図10に示します。
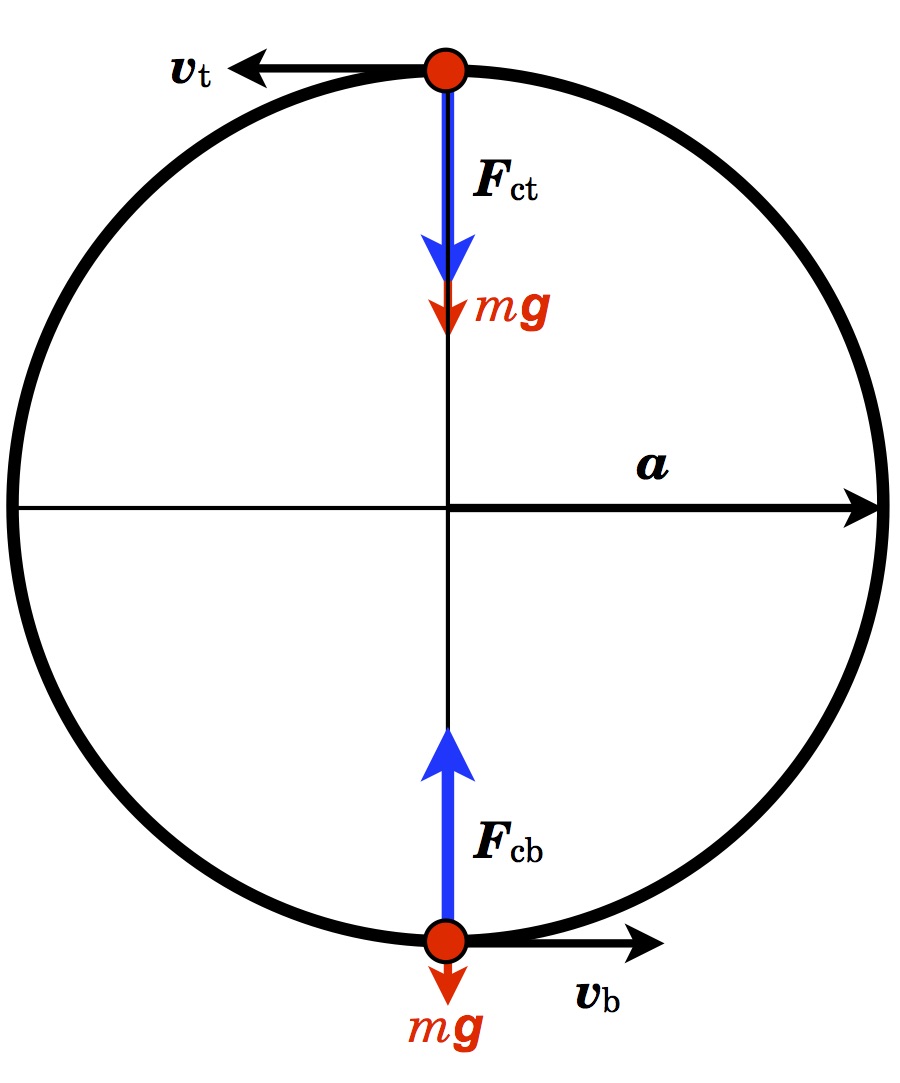
図10:回転する車輪に働く力
軸の両側を支えた場合の図3と異なる点は、質点に働く力が向心力だけではなく、重力も加わる点にあります。これが車輪のその後の振舞いを理解するポイントになります。
過渡期
この状況において特殊な位置である最上点(top)と最下点(bottom)に質点が来ている瞬間を考えます。この瞬間においては、重力と向心力が平行、或いは反平行になります。両点における向心力の大きさは、
$$F_{c,top}=F_c+mg$$
$$F_{c,bottom}=F_c-mg$$
になります。
さて、質点の軌道の曲率半径は向心力によって決まります。
支点の数を一つに減らした直後では、最上点と最下点における質点の速さは同じで、共に $|v_t|=|v_b|=v$ であり、向心力の大きさが $F_c$ の場合に、丁度、軌道が車輪の円周上にきます。
しかし、最上点では重力分だけ向心力が強くなり、軌道半径は $r_{top}\lt a$ と車輪の半径よりも小さくなります。
一方、最下点では向心力が重力により弱められ、軌道半径が車輪の半径よりも大きく $r_{bottom}\gt a$ となります。
さて、これらを考慮すると、その後の質点系の振舞いはどうなるでしょうか。図11に黄色の矢印で、最上点、最下点における予想される質点の軌道を示します。
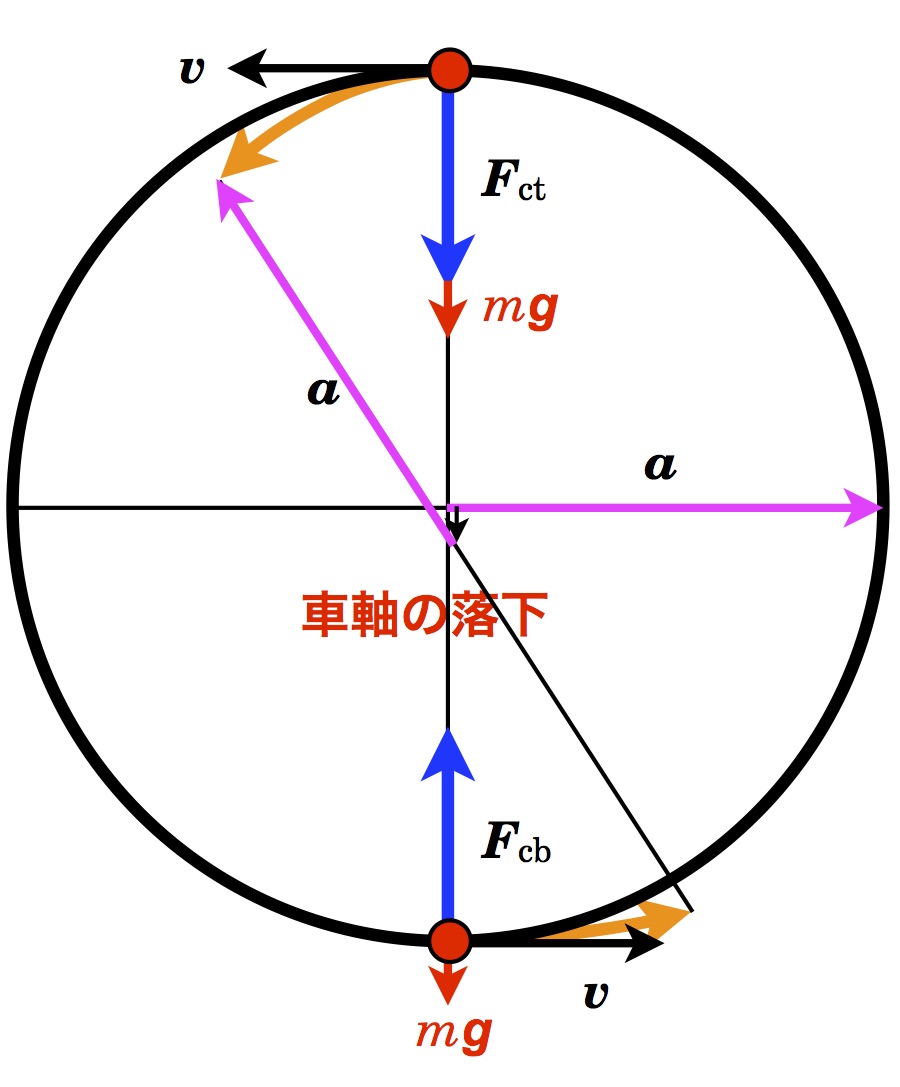
図11:回転する車輪の運動:直後の軌道
最上点では強い向心力により回転体の半径 $a$ よりも内側に軌道を取り、最下点では逆に弱い向心力のため外側に弱いカーブを描きます。
2つの質点を結ぶ棒は伸び縮みしませんので、2つの軌道の各点を結ぶ直線の長さは、常に $2a$ に保たれています。そのため、棒の中心点を通る回転軸は重力の方向に落下します。
最上点の質点は、最下点に達するまでの間、重力方向に加速され、一方、最下点の質点は、最上点に到達するまで、重力により減速されます。
その結果、最上点に来た時に最も速度が遅くなり、最下点に来た時に速度が最大になります。
平衡状態
ある程度の時間が経過すると、平衡状態に達するでしょう。その平衡状態では、最上点から最下点までの半周の間に重力から得た運動エネルギーが質点の運動エネルギーに加わります。その後の半周では、重力により減速され運動エネルギーを失います。
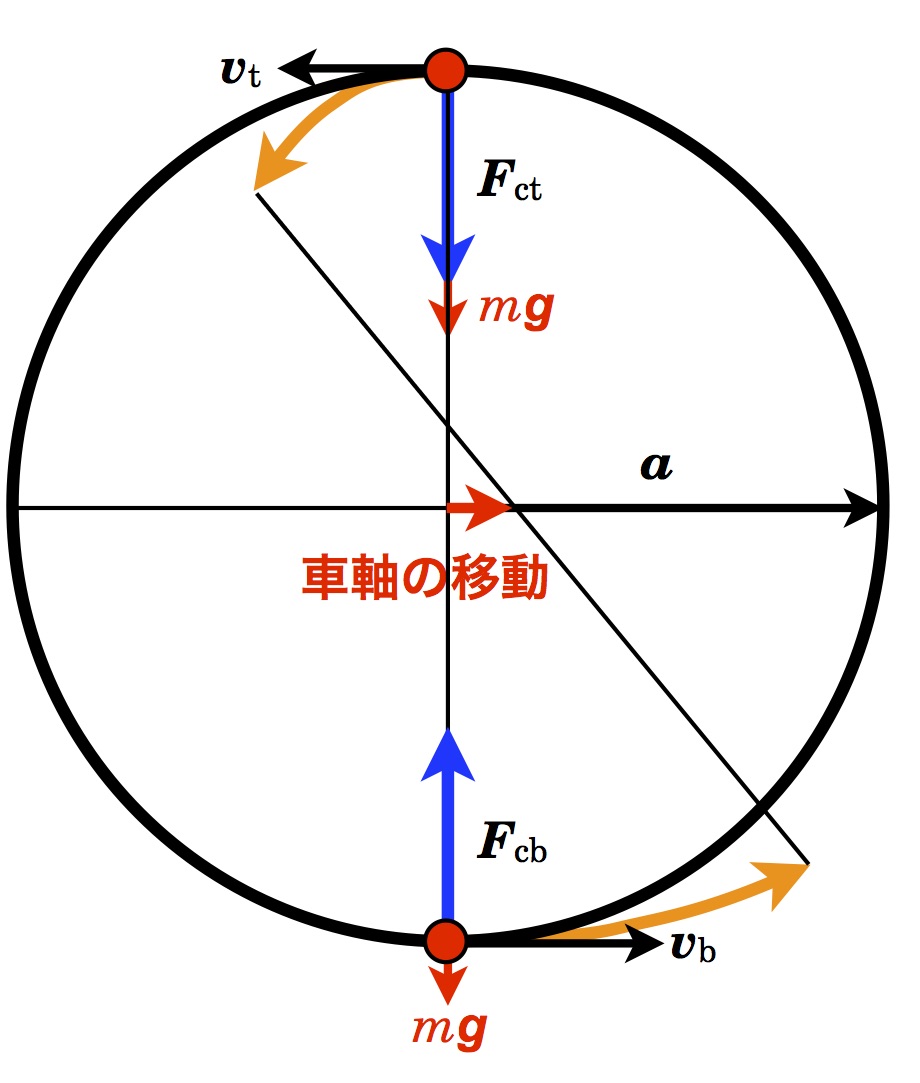
図12:回転する車輪の運動:平衡状態の軌道
支点の数を1つにした直後に最下点にいた質点は、その後の運動で重力により減速され、元の最上点の高さに到達出来ず車軸が落下します。
その結果、図9に示すように車軸が傾き、向心力に寄与する重力の成分が減少します。ここでは、回転速度が十分に早く、向心力が重力よりも十分に大きい場合に注目し、この効果は2次的で小さいと考えます。
平衡状態では、最上点、最下点でエネルギー保存則を満たす $v_t,\,v_b$ を持ちます。
$$\begin{equation}
\frac{mv_t^2}{2}=\frac{mv_b^2}{2}-2mga \\
v_t=\sqrt{v_b^2-4ga}
\label{velocities}
\end{equation}$$
この条件を満たす定常状態では、一周すると元の速度、高さに戻り、重力場のする仕事の合計が丁度打ち消し合ってゼロになります。
図12にその様子が示されています。平衡状態では、車軸の高さは変化せず、$\vec{v}_b$ の方向に移動していきます。これが車輪の歳差運動に相当します。
歳差運動をする車輪の重心の速さを、回転の運動方程式の解析から得られた式($\ref{precessionvel}$)の $\large v_{pr}=\frac{g}{\omega}\left(\frac{l}{a}\right)^2$ と比較してみるのは興味深いです。
平衡状態で歳差運動する車輪の重心の速度は、最高速の下端の質点速度 $v_b$ と最低速度の上端の質点速度 $v_t$ の差 $v_{b-t}=v_b-v_t$ で与えられます。
$$\begin{equation}
v_{b-t}=\frac{4ga}{v_b+v_t}=\frac{2ga}{(v_b+v_t)/2}
\end{equation}$$
質点の平均速度は $v=(v_b+v_t)/2$、平均角速度は $\omega=v/a$ なので、整理すると、
$$\begin{equation}
v_{b-t}=2\frac{g}{\omega}
\label{precessionvel2}
\end{equation}$$
と得られます。この速度は、車輪の回転軸が水平な(自由落下に相当する)条件で求めたので「支点からの腕の長さが十分に長い」という前提で成立つ式です。
式($\ref{precessionvel}$)と比較をすると、$l/a=\sqrt{2}$ に相当しています。車輪の半径の1.4倍ほどに車輪の重心から支点の位置を外すと、支点を1つにした直後はほとんど自由落下に近くなることを示唆しています。
一方で、式($\ref{precessionvel}$)は $l$ が大きい場合に合理的でない予想を与えます。例えば、$l/a=>\infty$ では($L$ を有限とすると適用条件 $N\ll L$ を逸脱しているが) $v_{pr}$ が発散します。物理的にはあり得ない結果です。式(\ref{Newton2})の解析から明らかになったように、歳差運動のエネルギー源は車輪の直径程度の重力場の位置エネルギーであり、有限の直径を持つ車輪の重心速度を無限大に加速することは不可能です。
さて、平衡状態への移行に要する時間は、$F_c$ と $mg$ の大小関係が関わってきます。
車輪の回転速度が無限に早い極端な例では $F_c=\infty$ になり、重力の影響が無視できるので、即座に平衡状態になります。
また、車輪の角運動量も無限大になりますので、力のモーメントによる歳差運動の周期も無限大で、実質的に車軸は静止します。
もう一つの例は、$mg\gg F_c$ の場合で、最下点の質点を向心力が引き上げる前に、車輪の重心は重力で落下します。
まとめ
重力が働く中で、車軸の片側だけを支えた回転する車輪の振舞は、ニュートンの運動方程式を解析的に解いて理解することは困難です。
しかしベクトルの外積を用いることで、ニュートンの運動方程式から時間的に複雑な変化をする向心力を消去することが可能です。
そのようにして得られた回転の運動方程式は、力のモーメントが働かない限り角運動量が変化することはなく、定常的な回転運動を続ける事を予測します。
重力場中では、片側だけを支えた回転する車輪には力のモーメントが働き、歳差運動をする事も容易に予測します。
回転の運動方程式の威力は絶大ですが、質点の運動方程式を元に直感的な理解が出来れば、重力場中の回転する車輪の振舞をより理解できたと感じられるはずです。
その解析から、車軸の片側のみを支えた車輪には、向心力として重力も寄与するため、車輪上の各質点の軌道が円周上からずれて行く事が、車輪の歳差運動の起源であると確認できました。
戻る