ここでは、速度に比例する摩擦があるときに、ƒ0 cosωt の外力を加える強制振動を考えよう.運動方程式は
 (1)
(1)
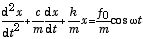
で与えられる非同次微分方程式になる(右辺が0の時に同次(斉次)微分方程式と呼ぶ).一般的に強制振動の場合は、単振子の固有振動数 ω0 ではなく ω で振動する。また、摩擦は揺れを遅らせるため、外力の振動(ω)より位相が遅れる.
 |
 |
 |
複素ベクトル表示
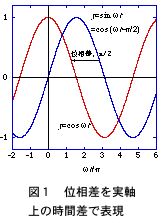
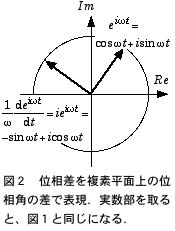
そこで x = x0 eiωt と置くと、(1) 式の微分方程式の時間に依存しない定常解は複素平面内のベクトル和で理解出来る.t = 0 の時には、図3の様に外力を ƒ0 cosωt = ƒ0 Re{eiωt} と複素ベクトルの実数部分に対応させる前提で ƒ0eiωt とし、t = 0 の瞬間の図を書くと、
(1)バネの復元力の項、ω02 x と、2回微分で位相が π だけ回転する加速度の項は、外力と同様に実軸上のベクトル、
(2)一方、時間の一回微分の速度に比例する摩擦項は iωeiωt となり、複素平面上で位相が π/2 だけ回転した虚軸上のベクトル、
になる.変位の振幅 x0 を実数とすると、摩擦がない時は(γ = 0)(1) 式の全ての項は実軸上のベクトル(図3)なので、 x = x0 eiωt の振幅 x0 を調整すれば (1) 式が0になる解を見つけられる.ところが、摩擦項が加わると、図3に示すように各項の長さをどのように調節しても x0 が実数である限り、3つの複素ベクトル(加速度+摩擦+復元力)と外力ベクトルとをつり合わせることは出来ない.
 |
強制振動の特別解
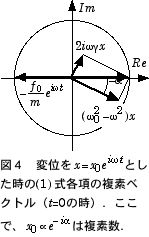
摩擦項がない時、t = 0 で全てのベクトルが実軸上に(任意の時間では一直線上に)来るため、定常状態の特別解は x = x0 eiωt を(1) 式に代入して x(t) = ƒ0eiωt/m(ω02–ω2) となる.一方、速度に比例する摩擦項が有限になると 2iωγx 項が虚軸に現れ、その増加につれて x の位相の遅れ –α が増加する.即ち、速度に比例する摩擦項の効果により振動の位相に外力からの遅れが生じてくる.考えている系に損失がある場合には、一般的に応答が遅れ、外力の振動数が系の共振周波数 ω0、或はそれ以上になると顕著になる.
(1) 式に定常解として予想される関数系 x = x0 ei(ωt–α)(複素数部分は振動の位相として e–iα に出したので、 x0 は実数に取って良い)を代入すると、
–ω2x + 2iγωx + ω02x – (ƒ0eiα/m)(x/x0) = [ω02–ω2 + 2iγω – (ƒ0/mx0)(cosα + isinα)]x
= {[ω02–ω2–(ƒ0/mx0) cosα] + i[2γω–(ƒ0/mx0) sinα]}x = 0
と整理できる.x としてゼロでない解が存在するためには、実部、虚部それぞれがゼロになる必要があるので、連立方程式
 |
 、
を解くことにより、x0 と α が決定でき、定常状態の特別解は、
、
を解くことにより、x0 と α が決定でき、定常状態の特別解は、
 、
、 (2)
(2)
で与えられる.
強制振動の一般解
さて、非同次微分方程式、(1) 式の一般解は、(2) 式の特解に、外力を0として得られる同次微分方程式:
 (3)
(3)
の一般解を加えて得ることが出来る.この式の解は、外力がなく、摩擦がある時の振動なので、初期条件で与えられた振動の振幅が時間と共に減衰をする「過渡現象」を表す。その過渡現象が納まった後に、外力による「定常的な振動」が残ることになる。
(3) 式を複素ベクトルで考えてみると、外力がないので x = x0 ei(ω0t-α) の様な単振動解を仮定しても、図3から想像できるように α と x0 をどの様に調整しても摩擦に起因する虚部を打ち消すことは出来ない.そのため、解の形として x = x0 e(–γ±iω)t を考える必要がある.ここで、e–γt の項は、振動解を時間と共に減衰させる重みを与える(「減衰振動」).微分してみると分かるように、e(–γ+iω)t は摩擦の第2項から –2γ2x + 2i γωx と位相が π/2 進んだ(時間軸で見ると、時間的に遅れた)虚数ベクトル成分を出すが、2回微分する第1項の加速度は (–γ + iω)2x = (γ2–ω2)x–2i γωx と、丁度虚数部を打ち消す特徴を持つために実数部だけでなく、虚数部もゼロにする事が可能になる.これは、振動振幅を徐々に減らす事によって、摩擦による時間の遅れを挽回していると言えよう。
さて具体的には、x = eλt と置いて求めた (3) 式の特性方程式 (λ2+2γλ+ω02)x = 0 を解いて得た

を用いて、最初の2つの場合は、2つの任意定数を含む一般解(「過減衰解」と「減衰振動解」、共に実数解)
xβ(t) = e–γt (x1eβt + x2e–βt) = x0 e–γt cosh(βt + α), (γ2 > ω02), tanhα = (x1–x2)/(x1+x2)
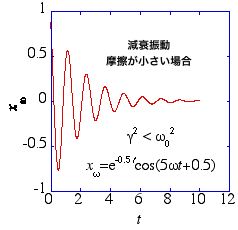
xω(t) = e–γt (x1eiωt + x2e–iωt) = x0 e–γt cos(ωt + α), (γ2 < ω02), tanα = –i(x1–x2)/(x1+x2) (4)
を得ることが出来る。
しかし、3番目の重根解、γ = ω0 の場合は2階微分方程式に対して一つの独立な関数 e–iγt しか得られないため、2つの積分定数を持つ一般解が作れない。そこで、e–iγt の係数が時間で変化すると考える「定数変化法」を用いる。即ち、x = y(t) e–iγt, γ = ω0 と置いて (3) に代入すると、γ2, γ の項は互いに打ち消し合うので、
と y(t) の2階微分の項のみが残り、2回積分して y(t)= at+b を得る。結局、(4a) と共に
x = (at + b) e–γt
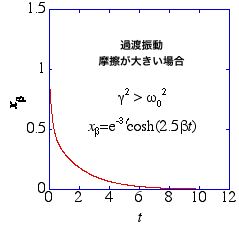
が2つの任意定数を持つ一般解として得られる。(4b) の解は「臨界減衰解 (critical damping)」と呼ばれる。
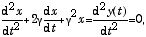
xβ(t) は摩擦項が単振動項よりも強く、1回振動しない内に振幅が減衰してしまう場合で「過減衰解 (overdamping)」を、xω(t) は摩擦が弱く、何回か振動している内にだんだん減衰して消えていく「減衰振動解 (damping oscillation)」を与える.なお、xω(t) が実数である条件は、x1 = x2* (複素共役)で、また、x0 = {2(x12+x22)}½ である.e–γt の因子は、速度に比例する摩擦によって生ずる、「振幅の減衰」を表し cosh(βt+α) 及び cos(ωt+α) は初期条件で決まる振動の因子になる.(2) 式と(4) 式を加えたものが(1) 式の強制振動の一般解を与える.
# 07/5/24